ย้อนกลับไปในเดือนพฤศจิกายน Luca Parmitano นักบินอวกาศสร้างประวัติศาสตร์โดยการควบคุมรถแลนด์โรเวอร์จากสถานีอวกาศนานาชาติ (ISS) ในฐานะส่วนหนึ่งของการทดลอง Analog-1 ความสำเร็จนี้เกิดขึ้นได้ด้วยโครงสร้างพื้นฐานคำสั่ง“ space อินเทอร์เน็ต” และการตั้งค่าการควบคุมแรงป้อนกลับ สิ่งนี้อนุญาตให้ Parmitano ขับรถระยะไกล 10,000 กม. (6,200 ไมล์) ในขณะที่โคจรรอบโลกด้วยความเร็ว 8 กม. / วินาที (28,800 กม. / ชั่วโมง; 17,900 ไมล์ต่อชั่วโมง)
การทดลองเหล่านี้ซึ่งเป็นส่วนหนึ่งของโปรแกรมเครือข่ายปฏิบัติการหุ่นยนต์เอนกประสงค์ (End-to-End Robotic Operation) (METERON) ของ ESA เกิดขึ้นในโรงเก็บเครื่องบินที่ Valkenburg ในเนเธอร์แลนด์ - ใกล้กับศูนย์วิจัยและเทคโนโลยีวิทยาศาสตร์แห่งยุโรป (ESTEC) การทดสอบครั้งแรกซึ่งเกิดขึ้นในวันที่ 18 พฤศจิกายนเกี่ยวข้องกับ Parmitano ที่นำทางรถแลนด์โรเวอร์ผ่านหลักสูตรอุปสรรคที่ออกแบบมาให้มีลักษณะและความรู้สึกเหมือนพื้นผิวของดวงจันทร์
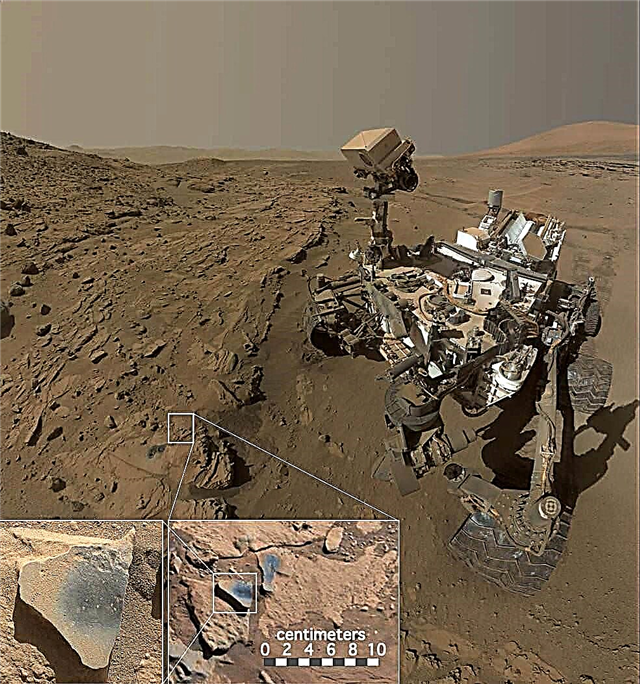
การทดสอบตรวจสอบความถูกต้องของเครือข่ายการควบคุมที่มีความซับซ้อนเช่นเดียวกับการควบคุมที่ให้ความรู้สึกสัมผัสกับนักบินอวกาศ สำหรับการทดสอบครั้งที่สองซึ่งเกิดขึ้นเมื่อวันที่ 25 พฤศจิกายนเกี่ยวข้องกับรถแลนด์โรเวอร์นำทางผ่านสภาพแวดล้อมทางจันทรคติจำลองเต็มรูปแบบเก็บตัวอย่างหินและเก็บตัวอย่างหิน การทดสอบนี้ประเมินความสามารถของรถแลนด์โรเวอร์ที่ดำเนินการจากระยะไกลเพื่อดำเนินการสำรวจทางธรณีวิทยาบนโลกมนุษย์ต่างดาว

ในฐานะวิศวกรของ ESA Kjetil Wormnes ซึ่งเป็นผู้นำการทดสอบ Analog-1 กล่าวในการแถลงข่าวล่าสุดของ ESA:
“ ลองนึกภาพหุ่นยนต์เป็นอวตารของ Luca บนโลกโดยให้ทั้งเขามองเห็นและสัมผัส มันประกอบไปด้วยกล้องสองตัวหนึ่งตัวอยู่ในมือของมันอีกตัวหนึ่งอยู่ในมือที่สามารถเคลื่อนไหวได้เพื่อให้ Luca และนักวิทยาศาสตร์ที่อยู่ห่างไกลสังเกตสภาพแวดล้อมและเข้าไปใกล้ก้อนหิน”
การใช้อุปกรณ์ตอบรับแรง Sigma 7 (ซึ่งให้อิสระแก่ผู้ใช้หกองศา) และจอภาพหนึ่งคู่ Parmitano นำทางยานสำรวจผ่านทางเดินแคบ ๆ เพื่อไปยังไซต์สุ่มตัวอย่างที่แตกต่างกันสามแห่งและเลือกก้อนหินสำหรับการวิเคราะห์ ตลอดเวลาที่ผ่านมาทีมผู้เชี่ยวชาญด้านธรณีวิทยาซึ่งตั้งอยู่ที่ European Astronaut Centre (EAC) ในโคโลญประเทศเยอรมนีได้ติดต่อกับเขาและให้คำแนะนำแก่เขาเกี่ยวกับหินที่มีแนวโน้มเป็นเป้าหมายการวิจัย
นี่เป็นครั้งแรกที่มีการใช้เทคโนโลยีประเภทนี้ในสถานีอวกาศนานาชาติเพื่อควบคุมหุ่นยนต์บนพื้นดิน นอกจากนี้ยังสร้างขึ้นจากโครงการก่อนหน้านี้ที่ดำเนินการโดย ESA ที่ออกแบบมาเพื่อทำความคุ้นเคยกับการศึกษาทางธรณีวิทยาของนักบินอวกาศ ในฐานะที่เป็น Jessica Grenouilleau หัวหน้าโครงการของ METERON ที่ ESA's Exploration Systems Group ระบุว่า:
“ เราได้รับประโยชน์จากการฝึกอบรมที่ผ่านมาของ Luca ผ่านโปรแกรม Pangea ของเราซึ่งให้ประสบการณ์เชิงอวกาศแก่นักบินอวกาศในด้านธรณีวิทยา มันช่วยได้อย่างมากในการพูดคุยอย่างมีประสิทธิภาพระหว่างลูกเรือกับนักวิทยาศาสตร์”

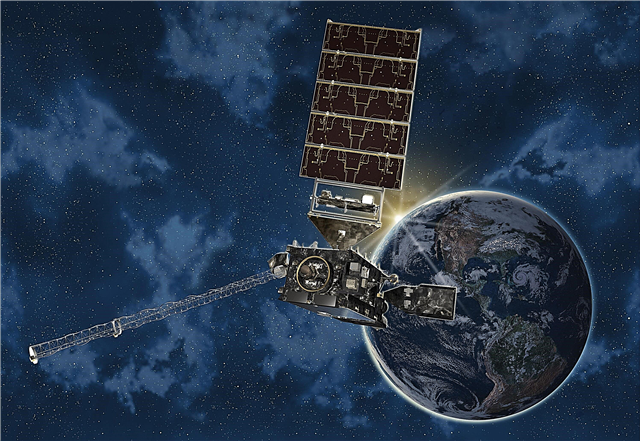
ลิงค์ควบคุมแบบสองทางระหว่างรถแลนด์โรเวอร์กับสถานีอวกาศนานาชาติทำให้เกิดขึ้นได้เนื่องจากดาวเทียมสื่อสารที่อยู่ในวงโคจร geostationary (GSO) Parmitano เหล่านี้เชื่อมต่อกับ EAC และไปยังโรงเก็บเครื่องบินที่การทดสอบเกิดขึ้นและมีเวลาหน่วง (หรือเวลาหน่วง) เพียง 0.8 วินาที ต้องขอบคุณอินเทอร์เฟซที่ปฏิวัติวงการทำให้ Luca สามารถรู้สึกได้ถึงหุ่นยนต์ที่สัมผัสพื้นดินหรือหยิบหินขึ้นมา
ฮาร์ดแวร์และซอฟต์แวร์ของ METERON ที่ใช้ในการทดลองเหล่านี้ได้รับการพัฒนาโดย Human Robot Interaction Laboratory ซึ่งตั้งอยู่ที่ Noordwijk ประเทศเนเธอร์แลนด์ การสนับสนุนจัดทำโดยสถาบันการบินและอวกาศของเยอรมัน (DLR) สำหรับหุ่นยนต์และเมคคาทรอนิกส์ซึ่งรับผิดชอบในการบูรณาการซอฟต์แวร์ควบคุมและปรับความคิดเห็นของระบบให้เหมาะสมเพื่อคำนึงถึงเวลาที่ล่าช้า
Thomas Robue วิศวกรหุ่นยนต์ ESA ซึ่งเป็นหัวหน้าฝ่าย HRI Lab อธิบาย:
“ สำหรับสถานการณ์การสำรวจครั้งนี้ซึ่งมีความล่าช้าค่อนข้างสั้นเราได้รวมข้อดีของมนุษย์และหุ่นยนต์เข้าด้วยกัน: มนุษย์สำหรับความสามารถในการจัดการกับสภาพแวดล้อมที่ซับซ้อนและไม่มีโครงสร้างและการตัดสินใจและหุ่นยนต์ที่คล่องแคล่วสามารถ รับมือกับสภาพแวดล้อมที่เลวร้ายและดำเนินการคำสั่งของผู้ปฏิบัติงานได้อย่างแม่นยำ
“ ด้วยการปรับปรุงประสบการณ์ของผู้ปฏิบัติงานด้วยการป้อนกลับแบบบังคับและการควบคุมที่ใช้งานง่ายเราสามารถทำให้งานควบคุมหุ่นยนต์ที่เป็นไปไม่ได้ก่อนหน้านี้เป็นไปได้และเปิดวิธีการใหม่ในการสำรวจอวกาศ ขณะนี้เรามีความกระตือรือร้นในการวิเคราะห์ข้อมูลและข้อเสนอแนะจาก Luca เพื่อดูรายละเอียดของวิธีการทำงานของเขาและค้นหาว่าเราสามารถปรับปรุงและเตรียมแผนการสำรวจในอนาคตได้อย่างไร”

การทดลองแบบแอนะล็อก 1 เป็นชุดล่าสุดของแคมเปญทดสอบมนุษย์ - หุ่นยนต์ของ METERON ที่มีความท้าทายยิ่งขึ้นที่เกี่ยวข้องกับสถานีอวกาศนานาชาติ การทดสอบแรงป้อนกลับครั้งแรก (ซึ่งเกี่ยวข้องกับหนึ่งองศาอิสระ) เกิดขึ้นในปี 2558 ซึ่งเป็นส่วนหนึ่งของการทดลอง Haptics-1 ตามมาในปี 2559 โดยการทดลองอิสระสององศาของ Kontur-2 ของ DLR ทั้งหมดนี้มาจากการทดลองอิสระหกองศาล่าสุด
ขั้นตอนต่อไปจะเกิดขึ้นในปีหน้าและจะเกี่ยวข้องกับการจำลองกลางแจ้งในสภาพแวดล้อมที่คล้ายกับดวงจันทร์ (ตั้งอยู่ที่ TBD ในขณะนี้) สำหรับการทดสอบระยะนี้รถแลนด์โรเวอร์จะรวบรวมและตรวจสอบตัวอย่างหินในพื้นที่ที่ออกแบบมาเพื่อให้คล้ายกับภารกิจพื้นผิวดวงจันทร์เต็มรูปแบบให้ใกล้เคียงที่สุด
เมื่อนักสำรวจหุ่นยนต์ถูกส่งไปยังดวงจันทร์และดาวอังคารในอนาคตอันใกล้นี้ METERON จะช่วยให้นักบินอวกาศควบคุมพวกมันจากถิ่นที่อยู่ในวงโคจรเช่น Lunar Gateway และ Mars Base Camp แทนที่จะส่งสัญญาณไปทั่วโลก เทคโนโลยีนี้ยังอนุญาตให้มีการสำรวจสภาพแวดล้อมที่ไม่สามารถเข้าถึงหรือเป็นอันตรายได้ซึ่งนักบินอวกาศไม่สามารถเข้าถึงได้
ให้แน่ใจว่าได้ตรวจสอบวิดีโอของการทดสอบ Analog-1 ล่าสุดนี้ด้วยความอนุเคราะห์จาก ESA: