ดาวเคราะห์ MicroBots เครดิตรูปภาพ: NASA คลิกเพื่อขยาย
บทสัมภาษณ์กับ Penny Boston ตอนที่ 1
หากคุณต้องการเดินทางไปยังดาวไกลโพ้นหรือค้นหาชีวิตบนโลกอื่นมันต้องใช้การวางแผนสักหน่อย นั่นเป็นสาเหตุที่ NASA ได้ก่อตั้ง NIAC ซึ่งเป็นสถาบันเพื่อแนวคิดขั้นสูงของ NASA ในช่วงหลายปีที่ผ่านมาองค์การนาซ่าได้ส่งเสริมให้นักวิทยาศาสตร์และวิศวกรคิดนอกกรอบเพื่อหาแนวความคิดในนิยายวิทยาศาสตร์ด้านนี้ ความหวังของพวกเขาคือความคิดเหล่านี้บางส่วนจะทำให้แตกต่างออกไปและจัดหาเทคโนโลยีที่สามารถใช้ประโยชน์ได้ในระยะเวลา 20, 30 หรือ 40 ปี
NIAC ให้เงินสนับสนุนในการแข่งขัน มีข้อเสนอเพียงไม่กี่ข้อเท่านั้นที่ได้รับการสนับสนุน การระดมทุนระยะที่ 1 นั้นน้อยมากพอสำหรับนักวิจัยที่จะสรุปแนวคิดของพวกเขาลงบนกระดาษ หากความคิดแสดงให้เห็นถึงความดีความชอบนั้นอาจได้รับเงินทุนสนับสนุนระยะที่สองเพื่อให้การวิจัยดำเนินต่อไปจากแนวคิดบริสุทธิ์ไปสู่ขั้นตอนต้นแบบหยาบ
หนึ่งในโครงการที่ได้รับเงินทุนระยะที่สองเมื่อต้นปีนี้คือความร่วมมือระหว่างดร. เพเนโลพีบอสตันและดร. สตีเวนดูบวสกี้เพื่อพัฒนา“ กระโดด microbots” ที่สามารถสำรวจภูมิประเทศที่เป็นอันตรายรวมถึงถ้ำใต้ดิน หากโครงการเลื่อนออกไปอาจมีการส่ง microbots กระโดดไปหาชีวิตใต้ผิวดาวอังคาร
บอสตันใช้เวลาส่วนใหญ่ในถ้ำศึกษาจุลินทรีย์ที่อาศัยอยู่ที่นั่น เธอเป็นผู้อำนวยการโครงการ Cave and Karst Studies และเป็นรองศาสตราจารย์ที่ New Mexico Tech ใน Socorro, New Mexico Dubowsky เป็นผู้อำนวยการของ MIT Field and Space Robotics Laboratory ที่ MIT ในเมืองเคมบริดจ์รัฐแมสซาชูเซตส์ เขาเป็นที่รู้จักในส่วนหนึ่งของการวิจัยของเขาในกล้ามเนื้อเทียม
นิตยสาร Astroiology สัมภาษณ์บอสตันไม่นานหลังจากที่เธอและ Dubowsky ได้รับการสนับสนุน Phase II NIAC นี่เป็นครั้งแรกของการสัมภาษณ์แบบสองส่วน นิตยสาร Astrology (AM): คุณและ Dr. Steven Dubowsky เพิ่งได้รับเงินทุนจาก NIAC เพื่อทำงานเกี่ยวกับแนวคิดของการใช้หุ่นยนต์จิ๋วเพื่อสำรวจถ้ำใต้ผิวดินบนดาวอังคาร? โครงการนี้เกิดขึ้นได้อย่างไร
เพนนีบอสตัน (PB): เราทำงานหลายอย่างในถ้ำบนโลกด้วยสายตาที่จะมองผู้อยู่อาศัยจุลินทรีย์ในสภาพแวดล้อมที่เป็นเอกลักษณ์เหล่านี้ เราคิดว่าพวกเขาสามารถทำหน้าที่เป็นแม่แบบเพื่อค้นหารูปแบบชีวิตบนดาวอังคารและวัตถุต่างดาวอื่น ๆ ฉันตีพิมพ์กระดาษในปี 1992 โดย Chris McKay และ Michael Ivanov เสนอว่าดินใต้ผิวดาวอังคารเป็นที่ลี้ภัยครั้งสุดท้ายของชีวิตบนโลกใบนั้นเมื่อมันเย็นลงและแห้งลงในช่วงเวลาทางธรณีวิทยา นั่นทำให้เราเข้าสู่ธุรกิจการค้นหาดินใต้ผิวดิน เมื่อเราทำเราค้นพบว่ามีสิ่งมีชีวิตที่น่าทึ่งมากมาย พวกมันมีปฏิสัมพันธ์กับแร่วิทยาและผลิตชีวประวัติที่เป็นเอกลักษณ์ ดังนั้นมันจึงกลายเป็นพื้นที่อุดมสมบูรณ์สำหรับเราในการศึกษา
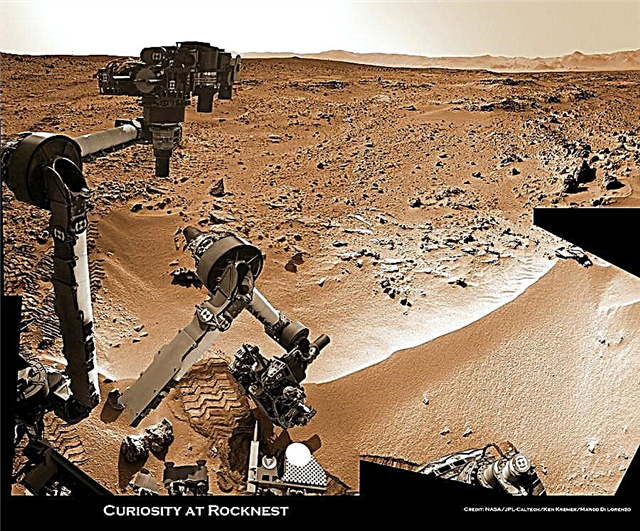
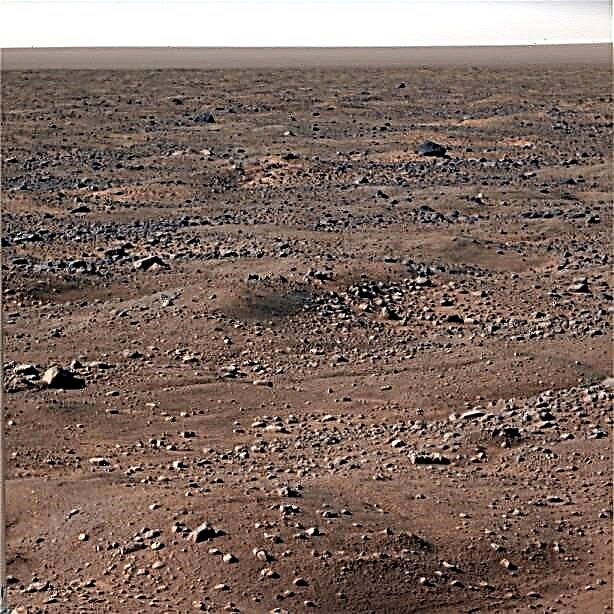
การเข้าไปในถ้ำที่ยากแม้บนดาวเคราะห์ดวงนี้ไม่ใช่เรื่องง่าย การแปลว่าเป็นภารกิจนอกโลกของหุ่นยนต์ต้องใช้ความคิด เรามีข้อมูลการถ่ายภาพที่ดีจากดาวอังคารซึ่งแสดงหลักฐานทางธรณีวิทยาที่ชัดเจนสำหรับถ้ำลาวาหลอดอย่างน้อย ดังนั้นเราจึงรู้ว่าดาวอังคารมีถ้ำอย่างน้อยหนึ่งประเภทที่อาจเป็นเป้าหมายทางวิทยาศาสตร์ที่มีประโยชน์สำหรับภารกิจในอนาคต มีความเป็นไปได้ที่จะคิดว่ายังมีถ้ำประเภทอื่นและเรามีกระดาษในสื่อพิเศษในสมาคมธรณีวิทยาแห่งอเมริกากระดาษพิเศษที่กำลังสำรวจกลไกการก่อตัวของถ้ำ (speleogenetic) บนดาวอังคาร จุดยึดขนาดใหญ่คือวิธีการเดินทางในภูมิประเทศที่เข้มงวดและยากลำบากเช่นนี้
AM: คุณสามารถอธิบายสิ่งที่คุณทำในระยะแรกของโครงการได้หรือไม่
PB: ในระยะที่ 1 เราต้องการมุ่งเน้นไปที่หน่วยหุ่นยนต์ที่มีขนาดเล็กจำนวนมาก (มีค่าใช้จ่ายมาก) ส่วนใหญ่เป็นอิสระและมีความคล่องตัวที่จำเป็นสำหรับการเข้าสู่ภูมิประเทศที่ขรุขระ จากการทำงานอย่างต่อเนื่องของดร. Dubowsky กับการเคลื่อนไหวของหุ่นยนต์ที่เปิดใช้งานกล้ามเนื้อเทียมเราได้แนวคิดเกี่ยวกับทรงกลมเล็ก ๆ จำนวนมากจำนวนน้อยเกี่ยวกับขนาดของลูกเทนนิสที่กระโดดไปมาคล้ายกับถั่วกระโดดเม็กซิกัน พวกเขาเก็บพลังงานของกล้ามเนื้อดังนั้นพูดและจากนั้นพวกมันก็จะพุ่งออกไปในทิศทางต่าง ๆ นั่นเป็นวิธีที่พวกเขาเคลื่อนไหว
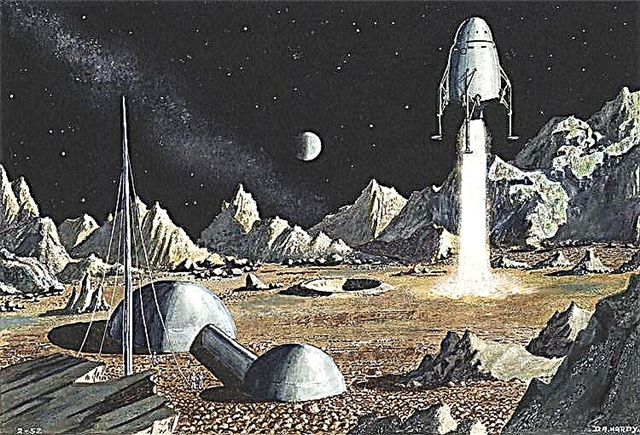
เครดิต: สร้างโดย R.D.Gus Frederick
การตั้งค่าดาวเคราะห์สำหรับพื้นผิวดาวเคราะห์ขนาดใหญ่และการสำรวจใต้ผิวดิน คลิกที่ภาพเพื่อดูขนาดใหญ่
เครดิตรูปภาพ: Render โดย R.D.Gus Frederick
เราได้คำนวณแล้วว่าเราน่าจะบรรจุคนเหล่านี้ประมาณหนึ่งพันคนไว้ในมวลบรรจุที่มีขนาดเท่ากับ MERs ปัจจุบัน (Mars Exploration Rovers) นั่นจะทำให้เรามีความยืดหยุ่นในการสูญเสียหน่วยใหญ่และยังมีเครือข่ายที่สามารถทำการรีคอนและการรับรู้การถ่ายภาพและบางทีอาจเป็นหน้าที่ทางวิทยาศาสตร์อื่น ๆ
AM: ทรงกลมเล็ก ๆ เหล่านี้ประสานกันได้อย่างไร
PB: พวกเขาทำตัวเป็นฝูง พวกเขาเกี่ยวข้องกันโดยใช้กฎง่าย ๆ มาก แต่นั่นสร้างความยืดหยุ่นอย่างมากในพฤติกรรมรวมของพวกเขาซึ่งทำให้พวกเขาสามารถตอบสนองความต้องการของภูมิประเทศที่ไม่แน่นอนและอันตราย ผลิตภัณฑ์ขั้นสุดท้ายที่เราคาดว่าจะเป็นกลุ่มคนตัวเล็ก ๆ เหล่านี้ที่ถูกส่งไปยังไซต์ลงจอดที่มีแนวโน้มออกจากแลนเดอร์แล้วเดินทางต่อไปยังดินใต้ผิวดินหรือพื้นที่อันตรายอื่น ๆ พวกเขาสร้างเครือข่ายการสื่อสารแบบเซลลูลาร์บนพื้นฐานแบบโหนดต่อโหนด
AM: พวกเขาสามารถควบคุมทิศทางที่พวกเขากระโดดได้หรือไม่?
PB: เรามีแรงบันดาลใจสำหรับพวกเขาในที่สุดจะมีความสามารถมาก เมื่อเราก้าวเข้าสู่ระยะที่สองเรากำลังทำงานร่วมกับ Fritz Printz ที่ Stanford ในเซลล์เชื้อเพลิงขนาดเล็กพิเศษเพื่อให้พลังงานแก่เด็กน้อยเหล่านี้ซึ่งจะช่วยให้พวกเขาสามารถทำสิ่งที่ค่อนข้างซับซ้อนได้ หนึ่งในความสามารถเหล่านั้นคือการควบคุมทิศทางที่ไป มีวิธีการบางอย่างที่พวกเขาสามารถสร้างที่สามารถอนุญาตให้พวกเขาไปในทิศทางเดียวหรืออื่น ๆ มันไม่แม่นยำอย่างที่คิดถ้าพวกมันถูกรถโรเวอร์ล้อไปบนทางตรง แต่พวกเขาจะไม่สามารถไปทิศทางที่พวกเขาต้องการมากกว่าหรือน้อยกว่า ดังนั้นเราจึงคาดว่าพวกเขาจะมีการควบคุมทิศทางอย่างน้อยที่สุด แต่คุณค่าจำนวนมากของพวกเขาเกี่ยวข้องกับการเคลื่อนที่ของกลุ่มในฐานะที่เป็นกลุ่มเมฆที่กำลังขยายตัว
ในฐานะที่เป็นยานยนต์ MER ที่ยอดเยี่ยมสำหรับวิทยาศาสตร์ที่ฉันทำฉันต้องการอะไรที่คล้ายกับความคิดหุ่นยนต์แมลงที่บุกเบิกโดย Rodney Brooks ที่ MIT ความสามารถในการแตะเข้าไปในแบบจำลองของหน่วยสืบราชการลับของแมลงและการปรับตัวเพื่อการสำรวจได้ดึงดูดฉันมานาน ฉันคิดว่าการเพิ่มสิ่งนี้เข้ากับการเคลื่อนไหวที่เป็นเอกลักษณ์โดยแนวคิดการกระโดดของดร. ดูโบวสกีสามารถทำให้หน่วยเล็ก ๆ น้อย ๆ เหล่านี้สามารถรอดพ้นจากอันตรายของภูมิประเทศใต้ผิวดินซึ่งดูเหมือนจะเป็นการผสมผสานที่น่าอัศจรรย์สำหรับฉัน
HB: ดังนั้นในระยะที่ 1 สิ่งเหล่านี้ได้ถูกสร้างขึ้นจริง ๆ หรือไม่?
PB: ไม่เฟส 1 กับ NIAC เป็นการศึกษาที่ใช้เวลานานถึงหกเดือนในการเรียนรู้ด้วยการกดนิ้วด้วยดินสอเพื่อ จำกัด ขอบเขตของศิลปะของเทคโนโลยีที่เกี่ยวข้อง ในระยะที่สองเราจะทำต้นแบบจำนวน จำกัด และการทดสอบภาคสนามในช่วงระยะเวลาสองปี สิ่งนี้น้อยกว่าสิ่งที่เราต้องการสำหรับภารกิจที่แท้จริง แต่แน่นอนว่าเป็นหน้าที่ของ NIAC ในการตรวจสอบเทคโนโลยี 10 ถึง 40 ปี เราคิดว่าน่าจะอยู่ในช่วง 10-20 ปี
AM: คุณคิดว่าเซ็นเซอร์หรืออุปกรณ์วิทยาศาสตร์ชนิดใดที่สามารถใส่สิ่งเหล่านี้ได้
PB: การถ่ายภาพเป็นสิ่งที่เราอยากทำอย่างชัดเจน เมื่อกล้องมีขนาดเล็กและทนทานอย่างไม่น่าเชื่อมีหน่วยอยู่ในช่วงขนาดที่สามารถติดตั้งกับสิ่งเหล่านี้ได้ อาจมีบางหน่วยที่สามารถติดตั้งความสามารถในการขยายดังนั้นจึงสามารถดูพื้นผิวของวัสดุที่พวกมันกำลังลงจอด การบูรณาการภาพที่ถ่ายด้วยกล้องขนาดเล็กในหน่วยเล็ก ๆ ที่แตกต่างกันจำนวนมากเป็นหนึ่งในพื้นที่สำหรับการพัฒนาในอนาคต มันเกินขอบเขตของโครงการนี้ แต่นั่นคือสิ่งที่เราคิดเกี่ยวกับการถ่ายภาพ และจากนั้นเซ็นเซอร์ตรวจจับสารเคมีก็สามารถสูดดมและสัมผัสกับสภาพแวดล้อมทางเคมีซึ่งเป็นสิ่งสำคัญมาก ทุกอย่างตั้งแต่จมูกเลเซอร์เล็ก ๆ ไปจนถึงอิเล็กโทรดเลือกไอออนสำหรับก๊าซ
เราคาดว่าจะมีพวกมันไม่เหมือนกันทั้งหมด แต่เป็นชุดที่มีหน่วยต่าง ๆ เพียงพอที่ติดตั้งเซ็นเซอร์ชนิดต่าง ๆ เพื่อให้ความน่าจะเป็นยังคงสูงแม้ว่าจะได้รับความสูญเสียค่อนข้างสูง จะยังคงมีชุดเซ็นเซอร์ที่สมบูรณ์ ถึงแม้ว่าแต่ละยูนิตจะไม่สามารถมีเซ็นเซอร์ขนาดใหญ่ได้ แต่คุณก็มีเพียงพอที่จะให้การซ้อนทับที่สำคัญกับยูนิตอื่น ๆ
AM: เป็นไปได้ไหมที่จะทำการทดสอบทางชีวภาพ?
PB: ฉันคิดอย่างนั้น โดยเฉพาะอย่างยิ่งถ้าคุณจินตนาการถึงกรอบเวลาที่เรากำลังดูอยู่ด้วยความก้าวหน้าที่กำลังออนไลน์อยู่กับทุกสิ่งตั้งแต่จุดควอนตัมไปจนถึงอุปกรณ์แล็บบนชิป แน่นอนความยากลำบากคือการได้รับตัวอย่างจากสิ่งเหล่านั้น แต่เมื่อเราติดต่อกับหน่วยงานภาคพื้นดินเล็กน้อยเช่น microbots ที่กระโดดของเราคุณอาจวางตำแหน่งได้โดยตรงกับวัสดุที่ต้องการทดสอบ เมื่อใช้ร่วมกับกล้องจุลทรรศน์และภาพถ่ายมุมกว้างฉันคิดว่าความสามารถในการทำงานทางชีววิทยาที่จริงจัง
AM: คุณมีความคิดว่าเหตุการณ์สำคัญใดที่คุณคาดหวังว่าจะเกิดขึ้นระหว่างโครงการสองปีของคุณหรือไม่
PB: เราคาดการณ์ไว้ว่าภายในเดือนมีนาคมเราอาจมีต้นแบบดิบที่มีความคล่องตัวที่เกี่ยวข้อง แต่นั่นอาจจะทะเยอทะยานมากเกินไป เมื่อเรามีหน่วยเคลื่อนที่แล้วแผนของเราคือทำการทดสอบภาคสนามในถ้ำลาวาหลอดจริงที่เรากำลังทำวิทยาศาสตร์ในนิวเม็กซิโก
ไซต์ฟิลด์ทดสอบแล้ว ในส่วนของระยะที่ฉันกลุ่ม MIT ออกมาและฉันสอนพวกเขาเล็กน้อยเกี่ยวกับการพังและภูมิประเทศที่เป็นจริง มันเป็นเครื่องเปิดตาที่ยิ่งใหญ่สำหรับพวกเขา การออกแบบหุ่นยนต์สำหรับห้องโถงของ MIT เป็นอีกสิ่งหนึ่ง แต่เป็นอีกเรื่องหนึ่งที่ต้องออกแบบหุ่นยนต์สำหรับสภาพแวดล้อมที่เป็นหินในโลกแห่งความเป็นจริง มันเป็นประสบการณ์การศึกษาที่ดีสำหรับเราทุกคน ฉันคิดว่าพวกเขามีความคิดที่ดีงามว่าเงื่อนไขคืออะไรที่พวกเขาต้องพบกับการออกแบบของพวกเขา
AM: เงื่อนไขเหล่านั้นคืออะไร?
PB: ภูมิประเทศที่ไม่สม่ำเสมออย่างมากรอยแยกมากมายที่คนเหล่านี้อาจติดอยู่ชั่วคราวดังนั้นเราจะต้องมีโหมดการทำงานที่จะช่วยให้พวกเขาหลุดพ้นตัวเองอย่างน้อยก็มีโอกาสที่จะประสบความสำเร็จ ความท้าทายของการสื่อสารแบบเห็นภาพในพื้นผิวขรุขระอย่างมาก รับก้อนหินขนาดใหญ่ ติดอยู่ในรอยแตกเล็กน้อย สิ่งของประเภทนั้น
ลาวาไม่ราบเรียบ การตกแต่งภายในของหลอดลาวานั้นเรียบเนียนภายในหลังจากที่พวกเขากำลังก่อตัวขึ้น แต่มีวัสดุจำนวนมากที่หดตัวและแตกและหล่นลง ดังนั้นมีกองเศษหินหรืออิฐที่จะได้รับรอบและมากกว่าและมีการเปลี่ยนแปลงสูง และนี่คือสิ่งที่หุ่นยนต์ทั่วไปไม่มีความสามารถที่จะทำ
แหล่งที่มาเดิม: นาซา