นักวางแผนภารกิจเกลียดชังมันจริงๆเมื่อหุ่นยนต์อวกาศเข้าใกล้ เรากำลังปรับปรุงโอกาสในการประสบความสำเร็จในวันนี้ (จำได้ว่าเป็นความหวาดกลัวเจ็ดนาทีของ Mars Curiosity) แต่เอเจนซี่อวกาศหนึ่งแห่งมีการจำลองที่น่าสนใจบนแขนเสื้อซึ่งจะทำให้การลงจอดแม่นยำยิ่งขึ้น
ดังกล่าวข้างต้นซอฟต์แวร์และฮาร์ดแวร์นี้ (ทดสอบที่สำนักงานอวกาศยุโรป) สร้างความประทับใจให้กับศูนย์การบินฝรั่งเศส ONERA ซึ่งเจ้าหน้าที่เมื่อเร็ว ๆ นี้ได้มอบรางวัลให้กับนักวิจัยนำ
“ ถ้าฉันเป็นนักท่องเที่ยวในปารีสฉันอาจมองหาเส้นทางไปยังสถานที่สำคัญที่มีชื่อเสียงเช่นหอไอเฟลอาร์กเดอทริมเพหรือวิหารนอเทรอดามเพื่อช่วยหาตำแหน่งของฉันบนแผนที่” Jeff Delaune, Ph.D . นักเรียนทำการวิจัย
“ หากกระบวนการเดียวกันซ้ำจากอวกาศด้วยจุดสังเกตพื้นผิวที่เพียงพอซึ่งเห็นได้จากกล้องซึ่งเป็นตาของยานอวกาศมันก็สามารถระบุได้อย่างแม่นยำว่ามันอยู่ที่ไหนโดยการเปรียบเทียบข้อมูลภาพกับแผนที่ที่เรามีอยู่บนคอมพิวเตอร์โดยอัตโนมัติ”

เนื่องจากจุดสังเกตระยะใกล้อาจดูแตกต่างจากที่ไกลมาก ๆ ระบบนี้จึงมีวิธีการลองแก้ปัญหานั้น
ระบบ 'Landing with Inertial and Optical Navigation' (LION) ที่เรียกว่าใช้ภาพแบบเรียลไทม์ที่สร้างโดยกล้องของยานอวกาศและเปรียบเทียบกับแผนที่จากภารกิจก่อนหน้านี้รวมถึงแบบจำลอง 3 มิติดิจิตอลของพื้นผิว
LION สามารถคำนึงถึงขนาดสัมพัทธ์ของทุก ๆ จุดที่เห็นไม่ว่าจะเป็นปล่องภูเขาไฟขนาดใหญ่หรือก้อนหินขนาดเล็ก
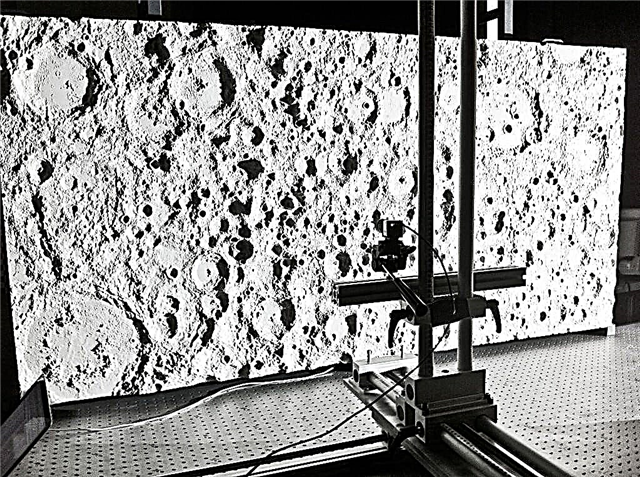
ที่ห้องปฏิบัติการฮาร์ดแวร์ควบคุมของ ESA ใน Noordwijk ประเทศเนเธอร์แลนด์เจ้าหน้าที่ทดสอบระบบด้วยแผนที่ความละเอียดสูงของดวงจันทร์
แม้ว่านี่จะเป็นเพียงการทดสอบและยังมีวิธีที่จะดำเนินการต่อไปก่อนที่ระบบนี้จะพร้อมใช้งานในอวกาศ ESA กล่าวว่าความแม่นยำของตำแหน่งจำลองนั้นดีกว่า 164 ฟุตที่ 1.86 ไมล์ในระดับความสูง (หรือ 50 เมตรที่ระดับความสูงสามกิโลเมตร)
โอ้และแม้ว่าจะผ่านการทดสอบกับภูมิประเทศจำลองของดวงจันทร์เท่านั้น แต่เป็นไปได้ว่าระบบเดียวกันสามารถช่วยให้หุ่นยนต์จอดบนดาวเคราะห์น้อยหรือดาวอังคาร ESA กล่าวเสริม
ไม่มีคำว่าเมื่อใดที่ระบบจะเชื่อมโยงกับการสำรวจอวกาศเป็นครั้งแรก แต่ Delaune กำลังทำงานเพื่อนำการวิจัยไปใช้กับเรื่องบกเช่นยานอวกาศไร้คนขับ
ดูรายละเอียดเพิ่มเติมเกี่ยวกับการทดสอบบนเว็บไซต์ของ ESA
ที่มา: ESA