เครดิตภาพ: ISRO
จรวด PSLV อินเดียระเบิดออกจากศูนย์อวกาศ Satish Dhawan ในวันนี้ซึ่งนำ IRS-P6 ดาวเทียมสำรวจระยะไกลไปยังวงโคจรขั้วโลกสูง 821 กม. IRS-P6 เป็นดาวเทียมสำรวจระยะไกลที่ทันสมัยที่สุดที่สร้างโดยองค์การวิจัยอวกาศแห่งอินเดีย (ISRO); มันจะตรวจสอบทรัพยากรธรรมชาติเป็นหลักเช่นน้ำการเกษตรและรวบรวมข้อมูลการจัดการที่ดิน
ในเที่ยวบินที่แปดที่ดำเนินการจาก Satish Dhawan Space Center, (SDSC), SHAR, Sriharikota, วันนี้ (17 ตุลาคม 2546), PSLV-C5 ยานสำรวจขั้วโลกของ ISRO ประสบความสำเร็จในการเปิดตัวดาวเทียมสำรวจระยะไกลของอินเดีย RESOURCESAT-1 (IRS) -P6) เข้าสู่วงโคจรสูง Synchronous Orbit (SSO) 821km RESOURCESAT-1 ขนาด 1,360 กิโลกรัมเป็นดาวเทียมสำรวจระยะไกลที่ล้ำยุคที่สุดและหนักที่สุดที่ ISRO เปิดตัว PSLV เป็นองค์ประกอบสำคัญของระบบตั้งแต่ต้นจนจบที่สร้างโดย ISRO สำหรับการวางแผนและการจัดการทรัพยากรธรรมชาติ
PSLV-C5 ยกออกจาก SDSC, SHAR, Sriharikota เวลา 10:22 น. พร้อมการจุดระเบิดของแกนกลางเวทีแรกและมอเตอร์สี่สาย มอเตอร์สตริปที่เหลืออีกสองตัวในระยะแรกติดไฟที่ 25 วินาทีหลังจากยกออก หลังจากผ่านเหตุการณ์การบินที่วางแผนไว้ซึ่งรวมถึงการแยกมอเตอร์แบบสายกราวด์แสงการแยกมอเตอร์ออนแอร์แบบมีไฟและขั้นตอนแรกการจุดระเบิดของขั้นตอนที่สองการแยกส่วนของชิ้นส่วนบรรทุกเครื่องบินหลังจากที่รถเคลียร์ บรรยากาศหนาแน่นการแยกขั้นตอนที่สองจุดระเบิดขั้นตอนที่สามการแยกขั้นตอนที่สามจุดระเบิดขั้นตอนที่สี่และขั้นตอนที่สี่ถูกตัดออก RESOUCESAT-1 ถูกฉีดเข้าสู่วงโคจรอย่างเป็นระบบ 1080 วินาทีหลังจากการยกออก
RESOURCESAT-1 ถูกแยกออกจากกันหลังจากการ reorientation ที่เหมาะสมของการรวมช่องใส่อุปกรณ์เวทีสี่เพื่อหลีกเลี่ยงการชนกับดาวเทียม RESOURCESAT-1 ได้ถูกวางในขั้ว Sun Synchronous Orbit (SSO) ที่ระดับความสูง 821 กม. โดยมีความเอียง 98.76 องศาเทียบกับเส้นศูนย์สูตร
เกี่ยวกับ PSLV
อาจสังเกตได้ว่า PSLV ได้รับการออกแบบและพัฒนาโดย ISRO เพื่อวางดาวเทียมตรวจจับระยะไกลระดับ 1,000 กิโลกรัมของอินเดียไว้ใน Orbit Sun-synchronous Orbit (SSO) นับตั้งแต่เที่ยวบินแรกที่ประสบความสำเร็จในเดือนตุลาคม 2537 ความสามารถของ PSLV ได้รับการปรับปรุงจาก 850 กก. เป็น 1,400 กิโลกรัมในปัจจุบันเป็น 820 กม. จาก Sun Synchronous Orbit PSLV ยังแสดงให้เห็นถึงความสามารถในการปล่อยดาวเทียมหลายดวง จนถึงขณะนี้ได้เปิดตัวดาวเทียมอินเดียเจ็ดดวงและดาวเทียมขนาดเล็กสี่ดวงสำหรับลูกค้าต่างประเทศ
การปรับปรุงความสามารถในการรับน้ำหนักของ PSLV ผ่านเที่ยวบินต่อเนื่องได้รับการดำเนินการหลายวิธี - การเพิ่มขึ้นของการโหลดจรวดของมอเตอร์โซลิดขั้นตอนแรกและมอเตอร์ของเหลวของเหลวขั้นที่สองและสี่การปรับปรุงประสิทธิภาพของมอเตอร์ขั้นที่สาม เคสมอเตอร์และการเพิ่มแรงขับของจรวดและใช้อะแดปเตอร์รับน้ำหนักของคอมโพสิตคาร์บอน ลำดับการยิงของมอเตอร์แบบรัดร้อยสายได้ถูกเปลี่ยนจากไฟส่องสว่างภาคพื้นดินสองชุดและไฟส่องทางอากาศสี่ดวงเป็นไฟส่องสว่างภาคพื้นดินสี่ชุดปัจจุบันและชุดไฟส่องทางอากาศสองชุด
ใน PSLV-C5 อะแดปเตอร์ขั้นที่สามที่เป็นโลหะถูกแทนที่ด้วยอันที่สร้างขึ้นด้วยคอมโพสิตคาร์บอน นอกจากนี้ขั้นตอนที่สองของจรวดขับเคลื่อนยังทำงานที่ความดันห้องสูงขึ้นเพื่อประสิทธิภาพที่ดีขึ้น
ในการกำหนดค่าปัจจุบันความสูง 44.4 เมตร, 294 ตัน PSLV มีสี่ขั้นตอนโดยใช้ระบบขับเคลื่อนที่เป็นของแข็งและของเหลวสลับกัน ขั้นตอนแรกเป็นหนึ่งในจรวดที่ขับเคลื่อนด้วยของแข็งที่ใหญ่ที่สุดในโลกและมีจรวดขับเคลื่อน Hydroxyl Terminated Poly Butadiene (HTPB) 138 ตัน มันมีขนาดเส้นผ่าศูนย์กลาง 2.8 เมตร ตัวเรือนมอเตอร์ทำจากเหล็ก maraging บูสเตอร์พัฒนาแรงขับสูงสุดประมาณ 4,762 kN มอเตอร์แบบรัดสายหกตัวซึ่งสี่จุดติดอยู่บนพื้นทำให้เพิ่มแรงผลักดันขั้นแรก มอเตอร์แบบสายแข็งสำหรับขับเคลื่อนแต่ละสายเหล่านี้มีตัวขับเคลื่อนแบบตันแข็งเก้าตันและให้แรงขับที่ 645 kN
ขั้นตอนที่สองใช้เครื่องยนต์ Vikas ที่สร้างขึ้นในประเทศและมีตัวขับเคลื่อน 41.5 ตัน - UH25 เป็นเชื้อเพลิงและ Nitrogen tetroxide (N2O4) เป็นตัวออกซิไดซ์ มันสร้างแรงขับสูงสุดประมาณ 800 กิโลนิวตัน
ขั้นตอนที่สามใช้ 7.6 ตันของจรวดที่เป็นของแข็งจาก HTPB และให้แรงขับสูงสุดที่ 246 kN ตัวเรือนมอเตอร์ทำจากเส้นใยโพลีอะไมด์ ขั้นตอนที่สี่และระยะปลายของ PSLV มีการกำหนดค่าเครื่องยนต์คู่โดยใช้ตัวขับเคลื่อนของเหลว ด้วยการโหลดจรวด 2.5 ตัน (โมโน - เมธิลไฮดราซีนและไนโตรเจนออกไซด์ผสม) แต่ละเครื่องยนต์เหล่านี้สร้างแรงขับสูงสุด 7.3 กิโลนิวตัน
ขนาดเส้นผ่าศูนย์กลาง 3.2 ม. ของเครื่องบินที่บรรจุแผ่นโลหะ PSLV เป็นโครงสร้าง isogrid และปกป้องยานอวกาศในช่วงการบินในบรรยากาศ PSLV ใช้ระบบเสริมระยะจำนวนมากสำหรับการแยกขั้นตอนการแยกส่วนของบรรทุกและการโยนทิ้ง ฯลฯ
ระบบควบคุม PSLV ประกอบด้วย: a) ขั้นแรก; อุปกรณ์ควบคุมแรงดันการฉีดทุติยภูมิทุติยภูมิ (SITVC) สำหรับระยะพิทช์และหันเห, thrusters ควบคุมปฏิกิริยาสำหรับม้วน b) ระยะที่สอง เครื่องยนต์ gimbal สำหรับระยะห่างและหันเหและมอเตอร์ควบคุมปฏิกิริยาก๊าซร้อนสำหรับการควบคุมม้วน c) ขั้นตอนที่สาม; หัวฉีดแบบยืดหยุ่นสำหรับ pitch และ yaw และ PS-4 RCS สำหรับการควบคุมม้วนและ d) ขั้นตอนที่สี่; เครื่องยนต์ gimbal สำหรับ pitch, yaw และ roll และ RCS on-off สำหรับการควบคุมในช่วงชายฝั่ง
ระบบนำทางเฉื่อยในช่องใส่อุปกรณ์ซึ่งอยู่ด้านบนของขั้นตอนที่สี่จะนำทางยานพาหนะจากการยกขึ้นสู่การฉีดยานอวกาศเข้าสู่วงโคจร ยานพาหนะได้รับเครื่องมือในการตรวจสอบประสิทธิภาพของยานพาหนะในระหว่างเที่ยวบิน Telemetry S-band PCM และ C-band รองรับข้อกำหนดนี้ ระบบติดตามให้ข้อมูลตามเวลาจริงเพื่อความปลอดภัยการบินและการกำหนดวงโคจรเบื้องต้นเมื่อดาวเทียมถูกส่งเข้าสู่วงโคจร
ศูนย์อวกาศ Vikram Sarabhai (VSSC) เขต Thiruvananthapuram ออกแบบและพัฒนา PSLV ISRO Inertial Systems Unit (IISU) ที่ Thiruvananthapuram พัฒนาระบบเฉื่อยสำหรับยานพาหนะ ศูนย์ระบบขับเคลื่อนของเหลวที่ Thiruvananthapuram พัฒนาขั้นตอนการขับเคลื่อนด้วยของเหลวสำหรับขั้นตอนที่สองและสี่ของ PSLV เช่นเดียวกับระบบควบคุมปฏิกิริยา ศูนย์อวกาศ Satish Dhawan (SDSC), SHAR ประมวลผลมอเตอร์ที่เป็นของแข็งและดำเนินการเปิดตัว ISTRAC ให้บริการระบบตรวจสอบและติดตามข้อมูลทางไกล
ด้วยการเปิดตัวที่ประสบความสำเร็จเจ็ดครั้ง PSLV ได้พิสูจน์ตัวเองว่าเป็นยานพาหนะที่เชื่อถือได้สำหรับการเปิดตัวดาวเทียมสำรวจระยะไกลของอินเดีย นอกจากนี้ยังใช้สำหรับการเปิดตัวดาวเทียมทางภูมิศาสตร์ KALPANA-1 ISRO ได้เสนอให้ใช้ PSLV สำหรับภารกิจไร้คนขับคนแรกของอินเดียสู่ดวงจันทร์ Chandrayaan-1
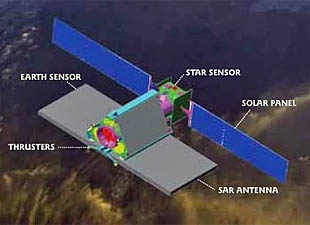
RESOURCESAT-1 มีกล้องสามตัวดังนี้:
* สแกนเนอร์เชิงเส้นด้วยตนเองความละเอียดสูง (LISS-4) ทำงานในแถบสเปกตรัมสามแถบในพื้นที่มองเห็นและใกล้อินฟราเรด (VNIR) ด้วยความละเอียดเชิงพื้นที่ 5.8 เมตรและสามารถควบคุมได้ถึง + 26 องศาตลอดเส้นทางเพื่อให้ได้ภาพสามมิติ ทบทวนความสามารถ
* ความละเอียดปานกลาง LISS-3 ทำงานในสามแถบสเปกตรัมใน VNIR และหนึ่งในวงคลื่นสั้นคลื่นสั้น (SWIR) ที่มีความละเอียดเชิงพื้นที่ 23.5 เมตร
* Advanced Wide Field Sensor (AWiFS) ทำงานในแถบสเปกตรัมสามแถบใน VNIR และหนึ่งวงใน SWIR ที่มีความละเอียดเชิงพื้นที่ 56 เมตร
RESOURCESAT-1 ยังมีโซลิดสเตตเรคคอร์ดซึ่งมีความจุ 120 Giga Bits เพื่อจัดเก็บภาพที่ถ่ายด้วยกล้องซึ่งสามารถอ่านได้ในภายหลังถึงสถานีภาคพื้นดิน
ไม่นานหลังจากการฉีดเข้าสู่วงโคจรแผงเซลล์แสงอาทิตย์บนบอร์ด RESOURCESAT-1 ถูกปรับใช้โดยอัตโนมัติเพื่อสร้างพลังงานไฟฟ้าที่จำเป็นสำหรับดาวเทียม มีการดำเนินการเพิ่มเติมเช่นการทำให้มีเสถียรภาพของแกนสามแกน สุขภาพดาวเทียมกำลังถูกตรวจสอบอย่างต่อเนื่องจากศูนย์ควบคุมยานอวกาศที่บังกาลอร์ด้วยความช่วยเหลือของเครือข่าย ISTRAC ของสถานีที่บังกาลอร์ลัคเนามอริเชียส Bearslake ในรัสเซียและ Biak ในอินโดนีเซีย การดำเนินการเพิ่มเติมเกี่ยวกับดาวเทียมเช่นตัดแต่งวงโคจรตรวจสอบระบบย่อยต่างๆและในที่สุดการเปิดกล้องจะดำเนินการในไม่กี่วันข้างหน้า
ด้วยศูนย์ดาวเทียม ISRO (ISAC), บังกาลอร์ในฐานะผู้นำศูนย์ RESOURCESAT-1 ได้รับการยอมรับด้วยการสนับสนุนที่สำคัญจากศูนย์แอปพลิเคชันอวกาศ (SAC), อาเมดาบัด, ศูนย์ระบบขับเคลื่อนของเหลว (LPSC) ที่บังกาลอร์และ ISRO Inertial Systems Unit (IISU) ) ธีรุวนันทปุรัม ISTRAC รับผิดชอบการดำเนินการเริ่มต้นและในวงโคจรของ RESOURCESAT-1 สถานีรับสัญญาณข้อมูลระยะไกลแห่งชาติ (NRSA) ที่ Shadnagar ใกล้ Hyderabad ได้รับข้อมูลจาก RESOURCESAT-1
เมื่อได้รับมอบหมาย RESOURCESAT-1 จะไม่เพียง แต่ให้บริการต่อจาก IRS-1C และ IRS-1D เท่านั้น แต่ยังปรับปรุงบริการตรวจจับระยะไกลด้วยการให้ภาพที่มีความละเอียดเชิงพื้นที่ที่ดีขึ้นและแถบสเปกตรัมเพิ่มเติม
แหล่งต้นฉบับ: ข่าว ISRO