นักบินอวกาศเริ่มเครื่องยนต์รถแลนด์โรเวอร์ของคุณ เมื่อไม่นานมานี้นักบินอวกาศสองคนควบคุมยานพาหนะแบบโรเวอร์ในแคลิฟอร์เนียจากที่จอดอยู่บนสถานีอวกาศนานาชาติซึ่งอยู่เหนือศีรษะระยะทางประมาณ 400 ไมล์ (400 กิโลเมตร)
แนวคิดนี้เจ๋งในตัวเอง แต่ NASA มีจุดมุ่งหมายที่สูงกว่า เป็นความคิดเกี่ยวกับภารกิจของมนุษย์ดวงจันทร์และดาวเคราะห์น้อยและดาวอังคารที่หน่วยงานต้องการดำเนินการในวันเดียวถ้าได้รับเงินและการอนุญาต
อาจกล่าวได้ว่าคุณอาจมีทีมงานดาวอังคารใช้รถสำรวจเพื่อสำรวจพื้นผิวให้มากที่สุดเท่าที่จะทำได้ในเวลา จำกัด
Mars Curiosity และผู้บุกเบิกรุ่นก่อนได้ค้นพบสิ่งที่น่าอัศจรรย์บนดาวอังคาร แต่ความท้าทายคือการสื่อสารโดยเฉลี่ยระหว่างดาวอังคารกับโลกหน่วงเวลา 20 นาที นาซ่าพิจารณาปัญหานี้อย่างถี่ถ้วนผ่านเทคนิคต่าง ๆ เช่นซอฟต์แวร์หลีกเลี่ยงอันตรายเพื่อให้ความอยากรู้อยากเห็นพูดว่าจะไม่ชนกับก้อนหินดาวอังคารขนาดใหญ่ (เทคนิคเพิ่มเติมจาก NASA ที่ลิงค์นี้) แต่การมีนักบินอวกาศเหนือพื้นผิวจะลดเวลาล่าช้าและอาจเปลี่ยน Mars rover ที่ขับขี่ตลอดไป

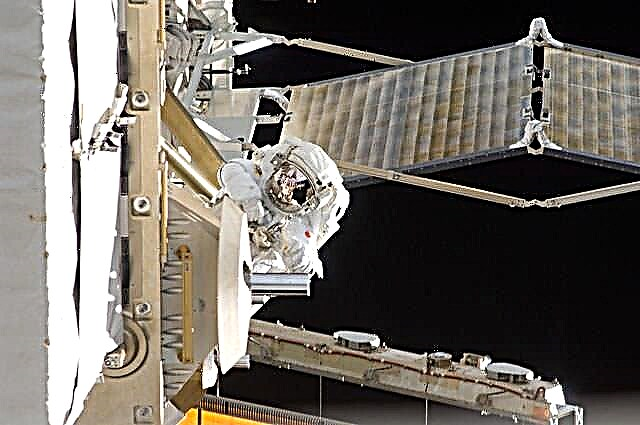
ดังนั้นเกี่ยวกับการทดสอบนั้น: นักบินอวกาศสองคนจนถึงตอนนี้ได้เรียกใช้ยานพาหนะของดาวเคราะห์ K10 รอบ ๆ “ Roverscape” ที่ศูนย์วิจัย Ames ของ NASA ในแคลิฟอร์เนีย นาซ่าเรียกสิ่งนี้ว่า“ การปฏิบัติการระยะไกลแบบอินเตอร์แอคทีฟอย่างเต็มรูปแบบครั้งแรกของนักบินอวกาศในอวกาศ
Chris Cassidy ของ Expedition 36 ขึ้นเป็นครั้งแรกในวันที่ 15 มิถุนายนใช้เวลาสามชั่วโมงในการเคลื่อนย้ายเครื่องจักรไปรอบ ๆ ในพื้นที่ที่เต็มไปด้วยหินซึ่งมีขนาดเท่ากับสนามฟุตบอลสองแห่ง จากนั้นเพื่อนร่วมทีมของเขา Luca Parmitano ได้ผลัดกันในวันที่ 26 กรกฎาคมจนถึงการใช้งานเสาอากาศวิทยุจำลอง เซสชั่นการทดสอบอื่นควรจะเกิดขึ้นในเดือนสิงหาคม
“ ในขณะที่มันเป็นเรื่องธรรมดาในการสำรวจใต้ทะเลเพื่อใช้จอยสติกและควบคุมเรือดำน้ำระยะไกลโดยตรงหุ่นยนต์ K10 นั้นฉลาดกว่า” เทอร์รี่ฟงผู้จัดการโครงการเทเลโรโททิกสำรวจมนุษย์ที่อาเมสกล่าว
“ นักบินอวกาศโต้ตอบกับหุ่นยนต์ในระดับที่สูงขึ้นบอกพวกเขาว่าจะไปที่ไหนและจากนั้นหุ่นยนต์เองก็สามารถแยกแยะได้อย่างอิสระและชาญฉลาดว่าจะไปที่นั่นได้อย่างไร” ฟงซึ่งเป็นผู้อำนวยการกลุ่มหุ่นยนต์อัจฉริยะของอาเมสกล่าว
การทดสอบจำลองภารกิจไปยังจุด L2 Lagrangian ของดวงจันทร์ซึ่งเป็นจุดที่แรงโน้มถ่วงรวมของดวงจันทร์และโลกทำให้ยานอวกาศยังคงอยู่เหนือพื้นผิว ความเป็นไปได้ประการหนึ่งสำหรับภารกิจดังกล่าวคือการติดตั้งกล้องโทรทรรศน์วิทยุที่ด้านจันทรคติตรงข้ามกับโลกซึ่งห่างไกลจากเสียงวิทยุของโลก NASA กล่าว
การทดสอบเหล่านี้ยังแสดงถึงเทคนิคสองประการแรก:
- นาซ่ากำลังทดสอบระบบส่งข้อความข้อมูลหุ่นยนต์ Robot Application Programming Delegate (RAPID) เพื่อควบคุมหุ่นยนต์จากอวกาศโดยพื้นฐานแล้วทำงานเพื่อดึงข้อมูลลงในสิ่งจำเป็นพื้นฐานเพื่อให้การสื่อสารง่ายที่สุดเท่าที่จะทำได้ (RAPID ได้รับการทดสอบมาก่อน แต่ไม่เคยทำแบบนี้มาก่อน)
- เอเจนซี่ยังใช้ซอฟต์แวร์ Ensemble ในพื้นที่สำหรับเทเลโรโบติกเป็นครั้งแรก มันอธิบายสิ่งนี้ว่าเป็น "สถาปัตยกรรมเปิดสำหรับการพัฒนาการรวมและการปรับใช้ซอฟต์แวร์การดำเนินภารกิจ"
ที่มา: NASA